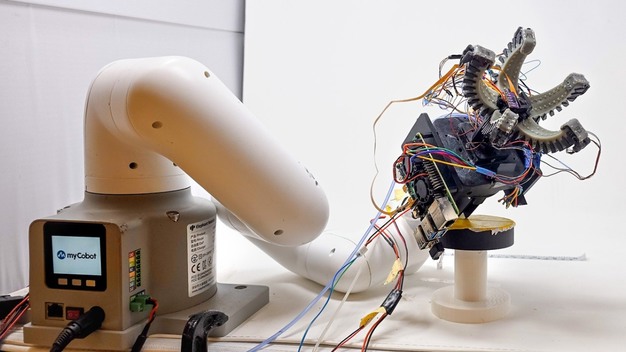
Onderzoekers van Cornell University in de staat New York hebben een zachte robotgrijper ontwikkeld met rekbare glasvezelsensoren. Die sensoren voelen hoe stevig fruit is, zodat de robot kan bepalen of aardbeien rijp zijn. Daarna plukt de robot ze zonder ze te beschadigen. Het systeem meet de stevigheid van het fruit en gebruikt een draaiende beweging om het van de plant los te maken.
Het onderzoek werd op 23 maart gepubliceerd in Nature Communications. Anand Mishra leidde het project in het lab van Rob Shepherd, hoogleraar werktuigbouwkunde. Het team werkte samen met Marvin Pritts, hoogleraar tuinbouw, om toepassingen te ontwikkelen voor de teelt van zachtfruit.
 © Cornell University
© Cornell University
"Het mooie van Cornell is dat we een sterke land- en tuinbouwfaculteit hebben, en dat opent veel deuren", zegt Shepherd. "Daardoor kunnen we onze kennis van robotica echt combineren met onze expertise in de land- en tuinbouw."
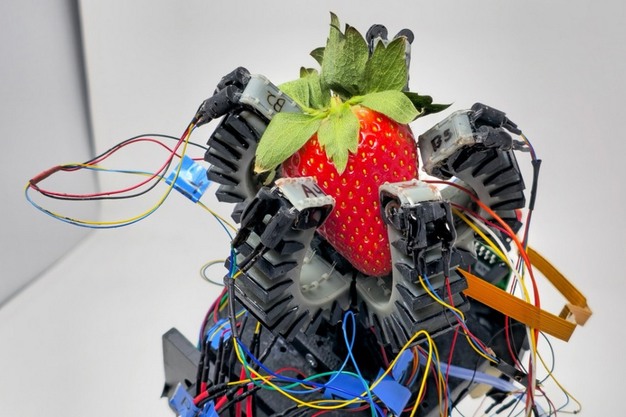
De grijper heeft twee glasvezelsensoren die kromming en druk meten. Zo kan het systeem de vorm van het fruit inschatten en de greep aanpassen om beschadiging te voorkomen. "De glasvezelsensoren hebben dezelfde mechanische eigenschappen als de grijper zelf. Het is een beetje alsof het vlees van de grijper het fruit voelt, in plaats van aparte sensoren", aldus Shepherd.
Het systeem werd getraind met aardbeien als proefgewas. "Je kunt goed zien wanneer aardbeien rijp zijn aan hun kleur", zegt Shepherd. "Zo konden we ons model leren wanneer een aardbei rijp is op basis van de tast, en dat vervolgens controleren aan de hand van de kleur. Anand kon nauwkeurig bepalen of het het juiste moment was om te plukken, puur op basis van de gemeten stevigheid."
Zodra de grijper het fruit vasthoudt, zorgt een tandwielmechanisme voor een draaiende beweging waarmee het fruit loskomt zonder dat eraan getrokken wordt. Er is ook een camera ingebouwd om fruit te herkennen dat achter bladeren verborgen zit.
 © Cornell University
© Cornell University
Het systeem kan ook worden ingezet bij gewassen waarbij rijpheid niet goed zichtbaar is, zoals avocado's, ananas en pawpaws. "Het probleem met pawpaws is dat je niet kunt zien wanneer ze rijp zijn, en ze rijpen zo snel dat je ze misloopt als je er niet op het juiste moment bij bent", zegt Shepherd.
De onderzoekers geven aan dat robotsystemen kunnen helpen bij teeltmodellen met meerdere gewassoorten en dat ze het gebruik van gewasbeschermingsmiddelen en meststoffen kunnen verminderen. "Met robots kunnen we dingen doen die nu economisch niet haalbaar zijn", zegt Shepherd. "Het is heel ingewikkeld om een teeltbedrijf op die manier te runnen, maar robots kunnen dat mogelijk maken."
Voor meer informatie:
Becka Bowyer
Cornell University
Tel: +1 607 220 4185
[email protected]
www.news.cornell.edu